I bought two Sony PlayStation DualShock 4 joysticks (DS4) recently. I’m planning to connect my Linux computer and use them in ROS. The current joystick_drivers in ROS does not support DS4.
To connect DS4 to Linux, I need to installl ds4drv to connect to the DS4 joysticks.
Following are the steps to connect joysticks:
1. Install & Run ds4drv:
sudo pip install ds4drv
sudo ds4drv
2. Connect DS4 joystick
Hold SHARE and PS button untill joystick indicator flashes. ds4drv will automatically search for device and establish connection. (If there is more than one joystick need to connect, just repeat the connection process for the first joystick.)

You can see print out like:
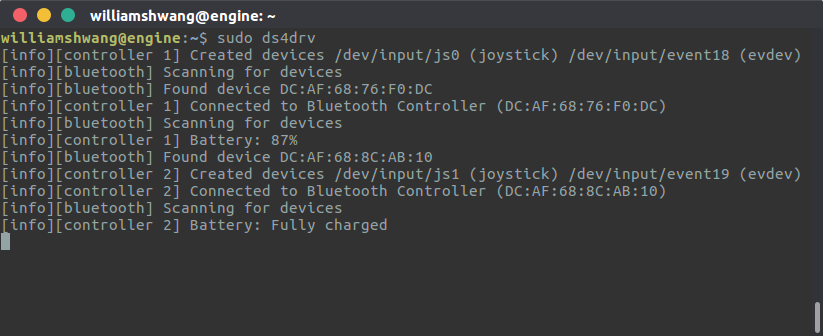
Joysticks has been assigned to /dev/input/js0 and /dev/input/js1.
3. Check Connection In ROS
In a new terminal,
roscore
In a new terminal, use roslaunch to start nodes for two joy sticks,
roslaunch ros_launch_file.launch
Launch file to launch two joy_node,
<?xml version="1.0"?>
<launch>
<group ns="j0">
<node name="ds4_joystick" pkg="joy" type="joy_node">
<param name="dev" value="/dev/input/js0" />
</node>
</group>
<group ns="j1">
<node name="ds4_joystick" pkg="joy" type="joy_node">
<param name="dev" value="/dev/input/js1" />
</node>
</group>
</launch>
4. Check joysticks’ output
Use ROS In two new terminals,
rostopic echo /j0/joy
rostopic echo /j1/joy
and see print out changes as you press the buttons.
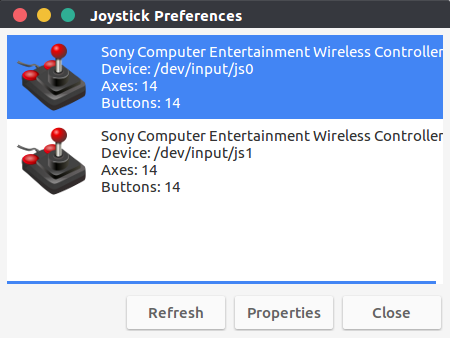
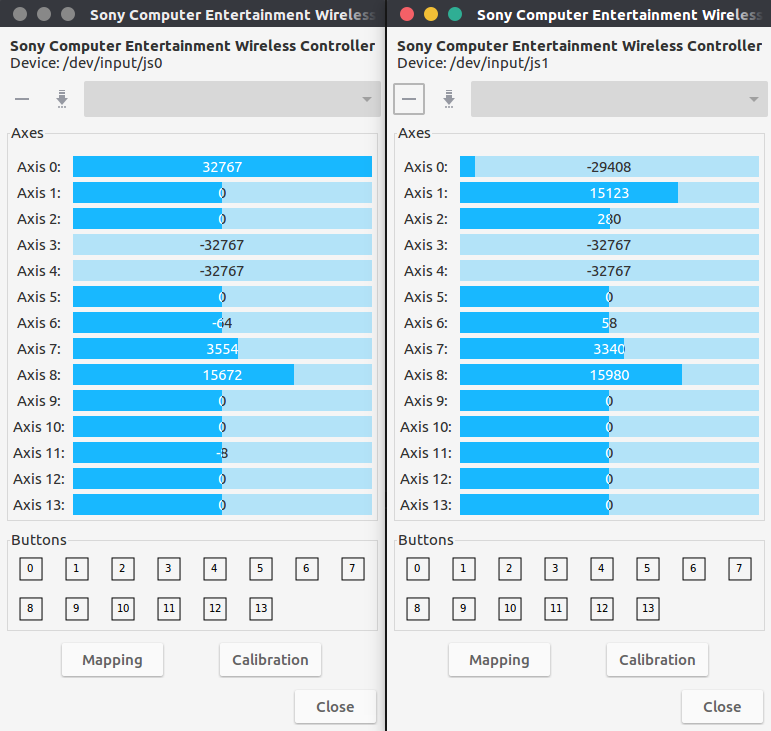
Or Check Joystick Output without Using ROS
Use jstest
sudo apt-get install jstest-gtk
jstest-gtk